Basic Ray Tracing
!pip install pillow --quiet
from qmcpy import *
from numpy import *
from time import time
from PIL import Image
from matplotlib import pyplot
from threading import Thread
%matplotlib inline
# constants
EPS = 1e-8 # numerical precision error tolerance
norm = lambda v: sqrt(dot(v,v))
e = array([0,0,0],dtype=float) # eye location at the orgin
class Camera(object):
""" An object to render the scene. """
def __init__(self, ax, scene, px=8, parallel_x_blocks=2, parallel_y_blocks=2, image_angle=90, image_dist=1):
"""
Args:
ax (axes): matplotlib ax to plot image on
scene (int): object with scene.render_px(p) method. See examples later in the notebook.
px (int): number of pixels in height and width.
Resolution = px*px.
parallel_x_blocks (int): number of cuts along the x axis in which to make parallel.
parallel_y_blocks (int): number of cuts along the y axis in which to make parallel.
parallel_x/y_blocks must be divisors of px.
Number of threads = parallel_y_blocks * parallel_x_blocks.
"""
self.ax = ax
self.scene = scene
self.px = px
self.fl = image_dist # distance from eye to image
self.i_hw = tan(image_angle/2)*self.fl # half width of the image
self.px_hw = self.i_hw/px # half width of a pixel
# set parallelization constants
self.p_xb = parallel_x_blocks; self.p_yb = parallel_y_blocks
bs_x = px/self.p_xb; bs_y = px/self.p_yb # block size for x,y
if bs_x%1!=0 or bs_y%1!=0: raise Exception('parallel_x/y_blocks must divide px')
self.bs_x = int(bs_x); self.bs_y = int(bs_y)
def render(self):
""" Render the image. """
t0 = time() # start a timer
img = Image.new('RGB',(self.px,self.px),(0,0,0))
if self.p_xb==1 and self.p_yb==1:
# use non-parallel processing (helpful for debugging)
self.block_render(img,0,self.px,0,self.px)
else:
# parallel processing
threads = [None]*(self.p_xb*self.p_yb)
i_t = 0 # thread index
for xb in range(0,self.px,self.bs_x):
for yb in range(0,self.px,self.bs_y):
threads[i_t] = Thread(target=self.block_render, args=(img,xb,xb+self.bs_x,yb,yb+self.bs_y))
threads[i_t].start() # start threads
i_t += 1
for i in range(len(threads)): threads[i].join() # wait for all threads to complete
self.ax.axis('off')
self.ax.imshow(asarray(img))
print('Render took %.1f seconds'%(time()-t0))
def block_render(self, img, px_x_start, px_x_end, px_y_start, px_y_end):
"""
Render a block of the image.
Args:
img (PIL.Image): the image to color pixels of.
px_x_start (int): x index of pixel to start rendering at.
px_x_end (int): x index of pixel to end rendering at.
px_y_start (int): y index of pixel to start rendering at.
px_y_end (int): y index of pixel to start rendering at.
"""
for p_x in range(px_x_start,px_x_end):
for p_y in range(px_y_start,px_y_end):
p = array([-self.i_hw+2*self.i_hw*p_x/self.px,-self.i_hw+2*self.i_hw*p_y/self.px,self.fl])
color = self.scene.render_px(p)
img.putpixel((p_x,self.px-p_y-1),color)
class Plane(object):
def __init__(self, norm_axis, position, color):
"""
Args:
norm_axis (str): either 'x', 'y', or 'z'.
position (str): constant position of plane along the norm_axis.
color (tuple): length 3 tuple of rgb values.
"""
dim_dict = {'x':0,'y':1,'z':2}
self.d = dim_dict[norm_axis]
self.pos = position # self.norm_axis coordinate of the floor
self.color = color
def hit(self, o, u):
"""
Test if the beam o+tu hits the plane.
Args:
o (ndarray): length 3 origin point.
u (ndarray): length 3 unit vector.
Returns:
tuple:
- hit (bool): was an object hit?
- hit_p (ndarray): point where beam intersects object.
- color (tuple): length 3 tuple rgb value.
"""
k = u[self.d]
if k != 0:
t = (self.pos - o[self.d]) / u[self.d]
if t > EPS:
return True, o+t*u # ray intersects the plane
return False, None # ray misses the plane
def normal(self, o, u):
"""
Get the unit normal vector to the plane at this point.
Args:
o (ndarray): length 3 origin point.
u (ndarray): length 3 unit vector in direction of light.
Returns:
ndarray: length three unit normal vector.
"""
v = array([0,0,0])
v[self.d] = 1
if dot(v,u)<0:
v[self.d] = -1
return v
class Ball(object):
def __init__(self, center, radius, color):
"""
Args:
center (ndarray): length 3 center position of the ball.
radius (float): radius of the ball.
color (tuple): length 3 tuple of rgb values.
"""
self.c = center
self.r = radius
self.color = color
def hit(self, o, u):
"""
Test if the beam o+tu hits the ball.
Args:
o (ndarray): length 3 origin point.
u (ndarray): length 3 unit vector.
Returns:
tuple:
- hit (bool): was an object was hit?
- hit_p (ndarray): point where beam intersects object.
- color (tuple): length 3 tuple rgb value.
"""
q = o - self.c
a = dot(u,u)
b = 2*dot(u,q)
c = dot(q,q) - self.r**2
d = b**2 - 4*a*c
if d > 0: # ray intersects sphere
tt = (-b + array([1,-1],dtype=float)*sqrt(d)) / (2**a)
tt = tt[tt>EPS] # only want intersection from rays moving in positive direction
if len(tt) >= 1: # at least one positive intersection
# beam going forward intersects ball
t = min(tt)
return True, o+t*u
return False, None # ray does not intersect sphere or only intersects in opposite direction
def normal(self, o, u):
"""
Get the unit normal vector to the sphere at thi point.
Args:
o (ndarray): length 3 origin point.
u (ndarray): length 3 unit vector in direction of light.
Returns:
ndarray: length three unit normal vector.
"""
v = (o-self.c)
v_u = v/norm(v)
return v_u
class PointLight(object):
""" A lamp that is a point and emits. light in all directions. """
def __init__(self, position, intensity):
"""
Args:
position (ndarray): length 3 coordinate of light position.
intensity (float): intensity of the light, between 0 and 1.
"""
self.p = position
self.i = intensity
class CustomScene(object):
def __init__(self, objs, light, n, d, mc_type):
self.objs = objs
self.light = light
self.black = array([0,0,0],dtype=float) # the color black
self.n = n
self.d = d
self.mc_type = mc_type
# generate constant samples to be used for every ray tracing event
if self.mc_type == 'IID':
self.pts = IIDStdUniform(2*self.d).gen_samples(self.n)
elif self.mc_type == 'SOBOL':
self.pts = Sobol(2*self.d,graycode=True).gen_samples(self.n)
else:
raise Exception("mc_type must be IID or Sobol")
def find_closest_obj(self,o,v):
"""
Find the closest object to point o heading in direction v
Args:
o (ndarray): length 3 coordinate of point we will try and find closest object to
Returns:
tuple:
hit (bool): weather any objects were hit.
hit_p (ndarray): length 3 coordinates of where obj was hit.
hit_dist (float): distance from hit_p to o.
hit_obj (object): the object that was hit.
"""
hit,hit_p,hit_dist,hit_obj = False,None,inf,None
for obj in self.objs:
obj_hit,obj_p = obj.hit(o,v)
if obj_hit:
v2 = obj_p-o # vector from o to object position
obj_dist = sqrt(dot(v2,v2))
if obj_dist < hit_dist:
hit,hit_p,hit_dist,hit_obj = True,obj_p,obj_dist,obj
return hit,hit_p,hit_dist,hit_obj
def get_obj_color(self,obj,p,l):
"""
Get the objects color at point p with light in direction l.
Args:
obj (object): object on which p lies
p (ndarray): length 3 coordinate of point on the object
l (ndarray): length 3 vector of direction from p to light source
Returns:
ndarray: length 3 RGB color
"""
n_v = obj.normal(p,l) # normal vector to obj at point p
color = obj.color*self.light.i*dot(n_v,l) / (norm(n_v)*norm(l))
return color
def beam_r(self,o,v,n,d,pts,nidx,didx):
"""
Recursive (Quasi-)Monte Carlo simulation of a light beam
Args:
o (ndarray): length 3 coordinate of current light beam position
v (ndarray): length 3 vector of light beam direction
n (ndarray): number of rays to cast when it cannot find light directly
d (int): remaining bounces before beam gives up
pts (ndarray): n samples x d dimension ndarray of samples generated by QMCPy
nidx (int): 2*(index of the beam)
didx (int): index of the sample
"""
hit,hit_p,hit_dist,hit_obj = self.find_closest_obj(o,v)
if hit: # an object was hit
l = self.light.p-hit_p # vector from position where beam hit to the lamp
l_dist = norm(l) # distance from hit location to lamp
l_u = l/l_dist # unit vector of l
itw,itw_p,itw_dist,itw_obj = self.find_closest_obj(hit_p,l_u) # find any object in the way
if itw and itw_dist<= l_dist: # object between hit object and the lamp
if d==0:
# no remaining bounces --> return black (give up)
return self.black
else:
# beam has remaining bounces
color_total = self.black.copy()
for i in range(n):
theta_0 = 2*pi*pts[nidx+i,didx]
theta_1 = 2*pi*pts[nidx+i,didx+1]
x = sin(theta_0)*sin(theta_1)
y = sin(theta_0)*cos(theta_0)
z = sin(theta_1)
v_rand = array([x,y,z],dtype=float) # random direction
ho_n = hit_obj.normal(hit_p,l_u)
if dot(v_rand,ho_n) < 0: v_rand = -v_rand # flip direction to correct hemisphere
obj_color = self.get_obj_color(hit_obj,hit_p,l_u)
color_total += obj_color*self.beam_r(hit_p,v_rand,n=1,d=d-1,pts=pts,nidx=nidx+i,didx=didx+2)
return color_total/n # take the average of many simulations
else: # nothin between the object and the light source
# get the color based on point, normal to obj, and direction to light
return self.get_obj_color(hit_obj,hit_p,l_u)
return self.black # nothing hit --> return black '
def render_px(self,p):
"""
Get pixel value for ball-lamp-floor scene
Args:
p (ndarray): length 3 array coordinates of center of pixel to render
"""
u = (p-e)/norm(p-e) # unit vector in direction of eye to pixel
color_0_1 = self.beam_r(e,u,n=self.n,d=self.d,pts=self.pts,nidx=0,didx=0)
color = (color_0_1*256).astype(int)
return color[0],color[1],color[2]
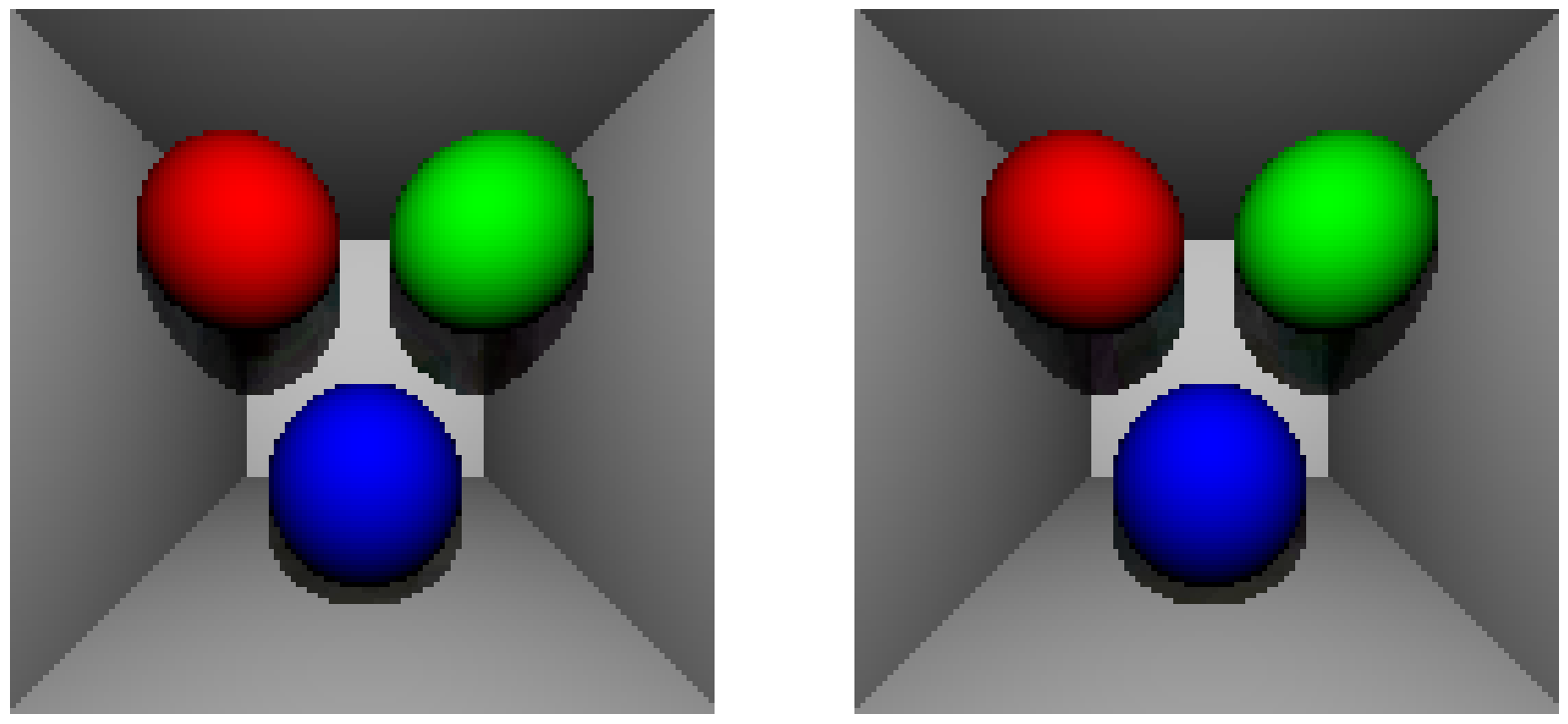
# create a scene
objs = [
Plane(norm_axis='y', position=-50, color=array([.75,.75,.75],dtype=float)), # floor
Plane(norm_axis='y', position=50, color=array([.75,.75,.75],dtype=float)), # ceiling
Plane(norm_axis='x', position=50, color=array([.75,.75,.75],dtype=float)), # right wall
Plane(norm_axis='x', position=-50, color=array([.75,.75,.75],dtype=float)), # left wall
Plane(norm_axis='z', position=150, color=array([.75,.75,.75],dtype=float)), # back wall
Ball(center=array([-25,25,75],dtype=float), radius=20, color=array([1,0,0],dtype=float)), # ball
Ball(center=array([25,25,75],dtype=float), radius=20, color=array([0,1,0],dtype=float)), # ball
Ball(center=array([0,-25,75],dtype=float), radius=20, color=array([0,0,1],dtype=float)), # ball
]
light = PointLight(position=array([0,25,0],dtype=float), intensity=1)
# parameters
n = 16 # number of beams
d = 8 # max bounces of any given beam
px = 128
# render image
fig,ax = pyplot.subplots(ncols=2,nrows=1,figsize=(20,10))# render scene
# IID (MC)
scene = CustomScene(objs,light,n,d,mc_type='IID')
camera = Camera(ax[0], scene, px=px, parallel_x_blocks=1, parallel_y_blocks=1, image_angle=pi/2, image_dist=1)
camera.render()
# Sobol (QMC)
scene = CustomScene(objs,light,n,d,mc_type='SOBOL')
camera = Camera(ax[1], scene, px=px, parallel_x_blocks=1, parallel_y_blocks=1, image_angle=pi/2, image_dist=1)
camera.render()
Render took 4.6 seconds
Render took 5.1 seconds